2017人教版高中物理高考模拟125681
高中
整体难度:偏难
2017-04-13
题号
一
二
三
四
五
评分
一、实验,探究题 (共7题)
添加该题型下试题
1.
(2017云南模拟)
如图甲所示,力传感器A与计算机相连接,可获得力随时间变化的规律。将力传感器固定在水平桌面上,测力端通过轻质细绳与一滑块相连,调节传感器高度使细绳水平,滑块放在较长的小车上,滑块的质量m=1.5 kg,小车的质量为M=1.65 kg。一根轻质细绳跨过光滑的轻质滑轮,其一端连接小车,另一端系一只空沙桶,调节滑轮使桌面上部细绳水平,整个装置处于静止状态。现打开传感器,同时缓慢向沙桶里倒入沙子,当小车刚好开始运动时,立即停止倒沙子。若力传感器采集的F-t图象如图乙所示,重力加速度g取10 m/s2,则:
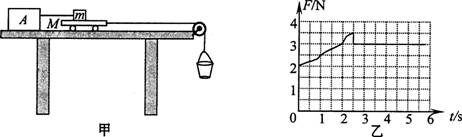
(1)滑块与小车间的动摩擦因数μ = ;若忽略小车与水平桌面间的摩擦,小车稳定运动的加速度大小a = m/s2。
(2)若实验中传感器测力端与滑块间的细绳不水平,左端略低一些,由此而引起的摩擦因数μ的测量结果 (填“偏大”或“偏小”)。
难度:
知识点:摩擦力
使用次数:74
【答案】
【命题意图】 本题考查静摩擦力、滑动摩擦力、牛顿运动定律等知识点。对静摩擦力要知道静摩擦力随外加沿切线方向外力的增加而增大,理解掌握最大静摩擦力;对滑动摩擦力,要理解意义,知道滑动摩擦力的方向与物体相对运动的方向相反,掌握其计算公式。对牛顿运动定律要熟练掌握,能够灵活运用。
【解题思路】(1)根据图乙所示的图象可知,木块m所受的滑动摩擦力为Ff=3.0N,木块m与小车之间的正压力FN=mg=1.5×10N=15N。由Ff=μFN,解得μ= 0.2。根据图乙所示的图象可知,最大静摩擦力为3.5N,立即停止倒沙子,说明小车所受拉力等于砂桶和砂的重力为mg=3.5N,砂桶和砂的质量m=0.35kg。若忽略小车与水平桌面间的摩擦,对小车和砂桶、砂整体,由牛顿第二定律,mg- Ff=(m+M)a,解得小车稳定运动的加速度大小a =0.25m/s2。
 【参考答案】(1) 0.2(2分),0.25(2分)
【参考答案】(1) 0.2(2分),0.25(2分)
(2)偏大(2分)
【图象分析】此题给出了力传感器采集的F-t图象,由该图象可以得出木块m所受的静摩擦力随砂桶和砂的重力的增大而增大,最大静摩擦力为3.5N。由该图象可以得出木块m所受的滑动摩擦力为3.0N。
【易错点拨】解答此题的易错点主要有:一是不能从力传感器采集的F-t图象中得到最大静摩擦力和滑动摩擦力;二是不能把最大静摩擦力与砂桶和砂的重力联系在一起得出砂桶和砂的总质量;三是不能把砂桶和砂及小车看作整体分析受力,利用牛顿第二定律正确列出相关方程。
2.
(2016·湖南郴州二模)如下图示的器材是:木质轨道(其倾斜部分倾角较大,水平部分足够长)、小铁块、两枚图钉、一根细线、一个万能量角器(万能角度尺又被称为角度规、游标角度尺和万能量角器,它是利用游标卡尺读数原理来直接测量工件角度或进行划线的一种角度量具,其主尺刻线每格为1°,游标的刻线总与主尺相差1°,如游标为30格是取主尺的29°等分,其读数方法与游标卡尺一样)。只用上述器材就可以测定小铁块与木质轨道间的动摩擦因数。实验步骤是:
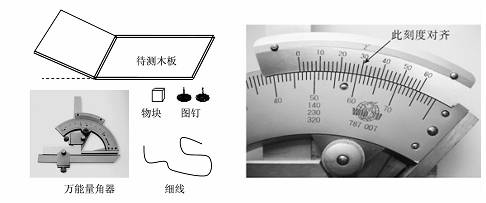
(1)将小铁块从倾斜轨道上的一固定位置由静止释放,让小铁块能下滑到水平轨道上。
(2)由图钉把细线钉在小铁块的起、终点处并拉直。
(3)用万能量角器测量 。(先用文字说明再用字母表示)那么测得小铁块与木质轨道间的动摩擦因数可表示为μ=____ 。
(4)若万能量角器的示数如图所示,则所测角度的读数为
难度:
知识点:摩擦力
使用次数:156
【答案】
【参考答案】:(3)细线与水平面之间的夹角θ, tanθ
(4)46°30’ (或46.5°)
【名师解析】设倾斜平面与水平面夹角为α,倾斜轨道上的一固定位置到最低点在水平面投影长度为L1,由动能定理,mg L1tanα-μmgcosα·L1/cosα-μmg(L- L1)=0,
设h= L1tanα,解得μ=h/L。
用万能量角器测量细线与水平面之间的夹角θ,则μ=tanθ。
根据游标卡尺读数规则,则所测角度的读数为46°30’ (46.5°)。
3.
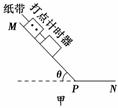
某物理兴趣小组想测量一滑块与木板间的动摩擦因数,他们将木板制作成如图9甲所示的斜面和平面,倾斜木板PM与水平木板PN通过P点处一段小圆弧相连接。将滑块从斜面上由静止释放,滑块带动纸带运动,当滑块运动至P点时,立即将木板PM放平,使其不影响打点效果,打出的纸带如图乙所示,O为打下的第一个点。经过测量,纸带每相邻两计数点间的距离为x1=1.99 cm,x2=6.01 cm,x3=9.99 cm,x4=14.01 cm,x5=17.25 cm,x6=16.00 cm,x7=14.00 cm,x8=12.01 cm,x9=9.99 cm;已知打点计时器的打点周期为0.02 s,图乙中每相邻两计数点间还有四个点没有画出,重力加速度g=9.8 m/s2。
![]()
乙
图9
(1)打点C时滑块的速度为________m/s。
(2)滑块与木板间的动摩擦因数等于________。(计算结果保留一位小数)
(3)滑块释放点距离斜面底端P的距离为________cm。
难度:
知识点:摩擦力
使用次数:62
【答案】
(1)1.2 (2)0.2 (3)40.5
 (3)观察纸带可以得出在DE段的某时刻滑块到达斜面底端P点,且滑块在斜面上的加速度为a斜=
(3)观察纸带可以得出在DE段的某时刻滑块到达斜面底端P点,且滑块在斜面上的加速度为a斜=![]() =4.0 m/s2,vF=
=4.0 m/s2,vF=![]() =1.5 m/s,假设从打下D点到滑块运动到P点的时间为tDP,则从打下C点到滑块运动到P点的时间为T+tDP,滑块由P点运动到打下F点的时间为2T-tDP,则有vP=vC+a斜(T+tDP)=vF+a(2T-tDP),解得tDP=0.05 s,故滑块在斜面运动时间为t斜=0.45 s,所以x=
=1.5 m/s,假设从打下D点到滑块运动到P点的时间为tDP,则从打下C点到滑块运动到P点的时间为T+tDP,滑块由P点运动到打下F点的时间为2T-tDP,则有vP=vC+a斜(T+tDP)=vF+a(2T-tDP),解得tDP=0.05 s,故滑块在斜面运动时间为t斜=0.45 s,所以x=![]() a斜t
a斜t![]() =0.405 m=40.5 cm。
=0.405 m=40.5 cm。
4.
图为测量物块与水平桌面之间动摩擦因数的实验装置示意图。实验步骤如下:
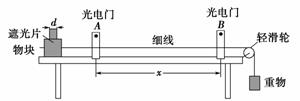
①用天平测量物块和遮光片的总质量M,重物的质量m,用游标卡尺测量遮光片的宽度d,用米尺测量两光电门之间的距离x;
②调整轻滑轮,使细线水平;
③让物块从光电门A的左侧由静止释放,用数字毫秒计分别测出遮光片经过光电门A和光电门B所用的时间ΔtA和ΔtB,求出加速度a;
④多次重复步骤③,求a的平均值![]() ;
;
⑤根据上述实验数据求出动摩擦因数μ。
回答下列问题:
(1) 测量d时,某次游标卡尺(主尺的最小分度为1 mm)的示数如图8所示。其读数为 cm。

图8
(2)物块的加速度a可用d、x、ΔtA和ΔtB表示为a= 。
(3)动摩擦因数μ可用M、m、![]() 和重力加速度g表示为μ= 。
和重力加速度g表示为μ= 。
(4)如果细线没有调整到水平,由此引起的误差属于 (填“偶然误差”或“系统误差”)。
难度:
知识点:专题十三 中学物理实验
使用次数:204
【答案】
(1)0.960 (2)![]()
(3)![]() (4)系统误差
(4)系统误差

5.
(2015··苏州质检)为了测量木块与木板间的动摩擦因数μ,某小组使用位移传感器设计了如图甲所示实验装置,让木块从倾斜木板上一点A由静止释放,位移传感器可以测出木块到传感器的距离.位移传感器连接计算机,描绘出滑块相对传感器的位移x随时间t变化的规律,如图乙所示.
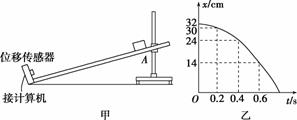
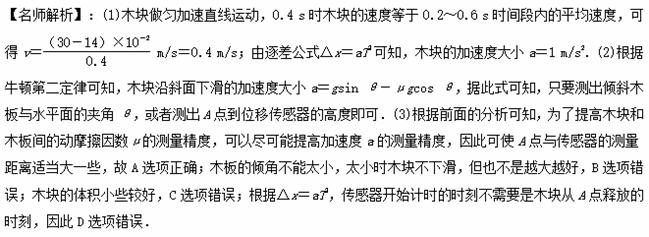
(1)根据上述图线,计算0.4 s时木块的速度v=________m/s,木块的加速度a=________m/s2.
(2)为了测定动摩擦因数μ,还需要测量的量是__________________________.(已知当地的重力加速度为g)
(3)为了提高木块与木板间动摩擦因数μ的测量精度,下列措施可行的是________.
A.A点与传感器距离适当大些
B.木板的倾角越大越好
C.选择体积较大的空心木块
D.传感器开始计时的时刻必须是木块从A点释放的时刻
难度:
知识点:专题十三 中学物理实验
使用次数:235
【答案】
(1)0.4 1
(2)倾斜木板与水平面的夹角(或者A点到位移传感器的高度) (3)A
本卷还有2题,登录并加入会员即可免费使用哦~
立即下载
全选试题
编辑试卷
收藏试卷

试题总数:
7
总体难度:
偏难
难度统计
难度系数
数量
占比
中等
7
100.0%
题型统计
大题类型
数量
占比
实验,探究题
7
100.0%
知识点统计
知识点
数量
占比
摩擦力
5
71.42%
专题十三 中学物理实验
2
28.57%
版权提示
该作品由: 用户厉翔宇分享上传
可圈可点是一个信息分享及获取的平台。不确保部分用户上传资料的来源及知识产权归属。如您发现相关资料侵犯您的合法权益,请联系 可圈可点 ,我们核实后将及时进行处理。